特殊指令:CAN通讯
Can_Config:CAN通讯配置
 |
CAN通讯配置指令用于设定CAN通讯参数,即波特率。
CAN通讯配置指令会遍历所有的硬件分频,使用误差最小的方式来实现需要设定的波特率。 |
Can_Enable:CAN报文接收开启
 |
CAN报文接收开启指令打开一个CAN报文接收筛选器,如果接收到的报文匹配此筛选器规则,则接收此报文。
可接收报文的ID为:接收报文ID与上筛选器ID掩码等于筛选器ID。
|
Can_Disable:CAN报文接收禁止
 |
CAN报文接收禁止指令关闭一个CAN报文接收筛选器。
|
Can_Transmit:CAN报文发送
|
CAN报文发送指令发送一个CAN报文。
|
Can_Receive:CAN报文接收
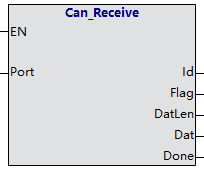 |
CAN报文接收指令接收一个CAN报文。
|